


Galyň simli lehimli iýmitlendiriji bilen 3 ok, awtomatlaşdyrylan lehimleme demir maşyn

Önümiň jikme-jiklik önümleri aýratynlyklary
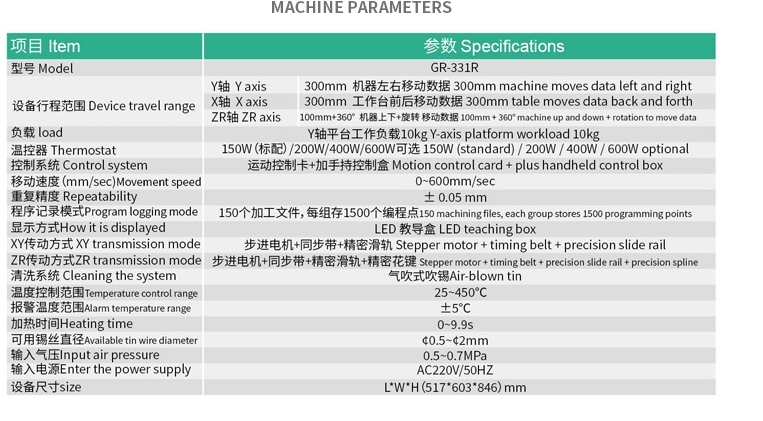
1. Önümiň modeli: GR-331R;
2. Çeýe kebşirlemek, süýräp kebşirlemek (kebşirlemek) we ş.m. ýaly funksiýalar bilen çeýe we dürli lehimleme usullary;
3. Enjam 150 gaýtadan işleýän faýly saklap bilýär, her topar 1500 programma nokadyny saklaýar;
4.Solder jitter funksiýasy, kebşirleýiş wagtynda bu funksiýany açmak, kebşirlemegi has çaltlaşdyryp biler, esasanam uly lehim bogunlary üçin täsirli;
5. Lehim traýektoriýasy görünýär, bu operatorlara lehimleme gidişine düşünmäge we in engineeringener işgärleriniň çözülmegine amatly bolýar;
6. Programmanyň redaktirlemesini nokatdan nokada göçürip, blokirlemek üçin programma ýazmagyň wagtyny azaldyp, öwrenmegi aňsat we aňsatlaşdyryp bolýar;
7. Enjam lehimleri gaýtadan işlemegiň hilini netijeli üpjün edýän we lehimleme demir ujunyň hyzmat möhletini uzaldýan awtomatiki arassalaýyş funksiýasyna eýedir;
8.Multi oky baglanyşdyrýan robot gollaryň hemmesi takyk ädim hereketlendirijileri we öňdebaryjy hereket dolandyryş algoritmleri bilen hereket edýär, hereketiň ýerleşişiniň takyklygyny we gaýtalanmagyny netijeli ýokarlandyrýar.
9. Müşderiniň taslamasyna laýyklykda robot demir uç dizaýnyny, ýöriteleşdirilen we önümçiligi hödürleýäris.
Önüm kategoriýalary
-

Iki lehimli ütük, iki termostat, senagat ...
-

360 ° Rota bilen litiý batareýa lehimleýji maşyn ...
-

Productionokary önümçilik netijeliligi Greenaşyl awtomatiki üç ...
-

Iki görnüşli lehimli maşynlar SI641R sim satyldy ...
-

Preokary takyk ýaşyl lehimleýji maşynlar awtomatiki ...
-

Iki Worki bilen awtomatiki sim lehimleýji maşyn ...





