Alty okly bilelikde işleýän robot nurbat berkidiji maşyn

Enjamyň parametri
| Model | GR-XFXZ950 |
| Robot ýetmek | 950mm |
| Robot gutarýan ýük | 16Kg |
| Iýmitlendiriş platformasy | Merkezi dolandyryş aýlaw stoly + servo motor |
| Iýmitlendirmek usuly | Urmak / spirat gabat gelýär |
| Gulp hasyly | 99,95% |
| Işleýän elektrik üpjünçiligi | AC220V |
| Işleýän howa çeşmesi | 0.4-0.7MPa |
| p | Takmynan 2,5 KW |
| Koordinat usulyny düzüň | Wizual ýerleşiş |
| Daşarky demensiýa (L * W * H) | 1400 * 1900 * 1950mm |
| Agramy (KG) | 800 |
| .Agdaý | Täze |
| Esasy komponentleriň kepilligi | 2 ýyl |
Enjam aýratynlyklary
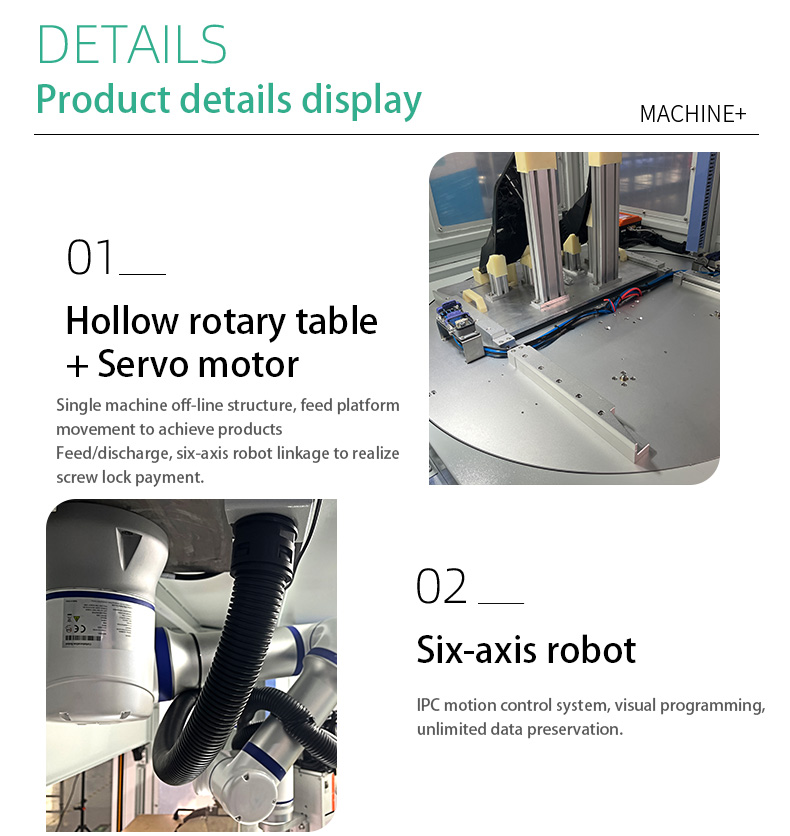
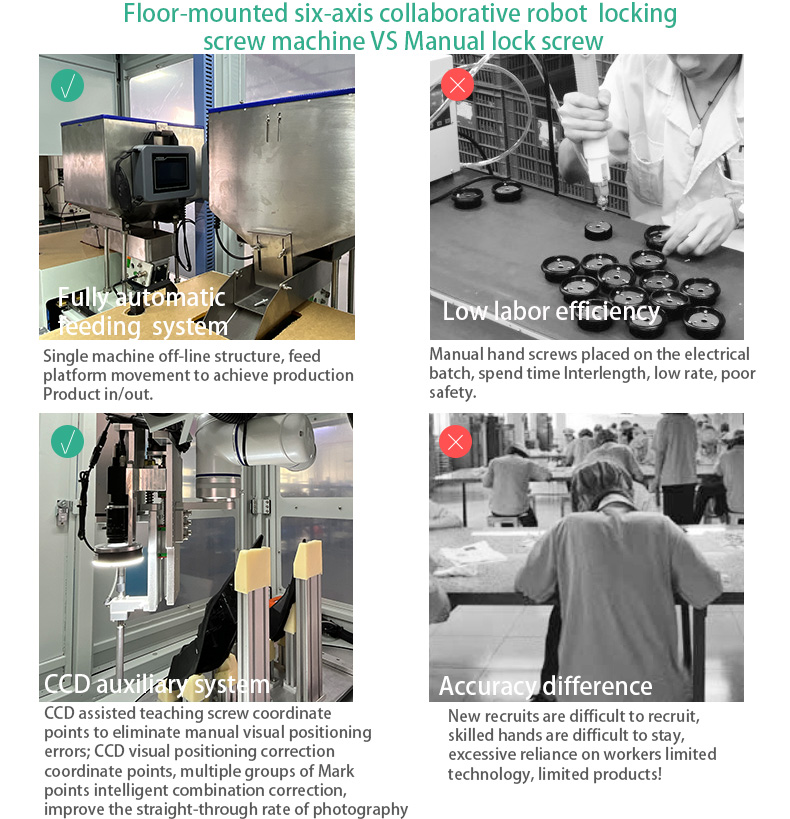
1. -eke-täk enjamdan daşarky gurluş, önümiň girişine / çykyşyna ýetmek üçin iýmit platformasynyň hereketi, nurbat gulp tölegini gazanmak üçin alty okly robot baglanyşygy
2.IPC hereketi dolandyrmak ulgamy, wizual programmirleme, çäklendirilmedik maglumat saklanyşy;
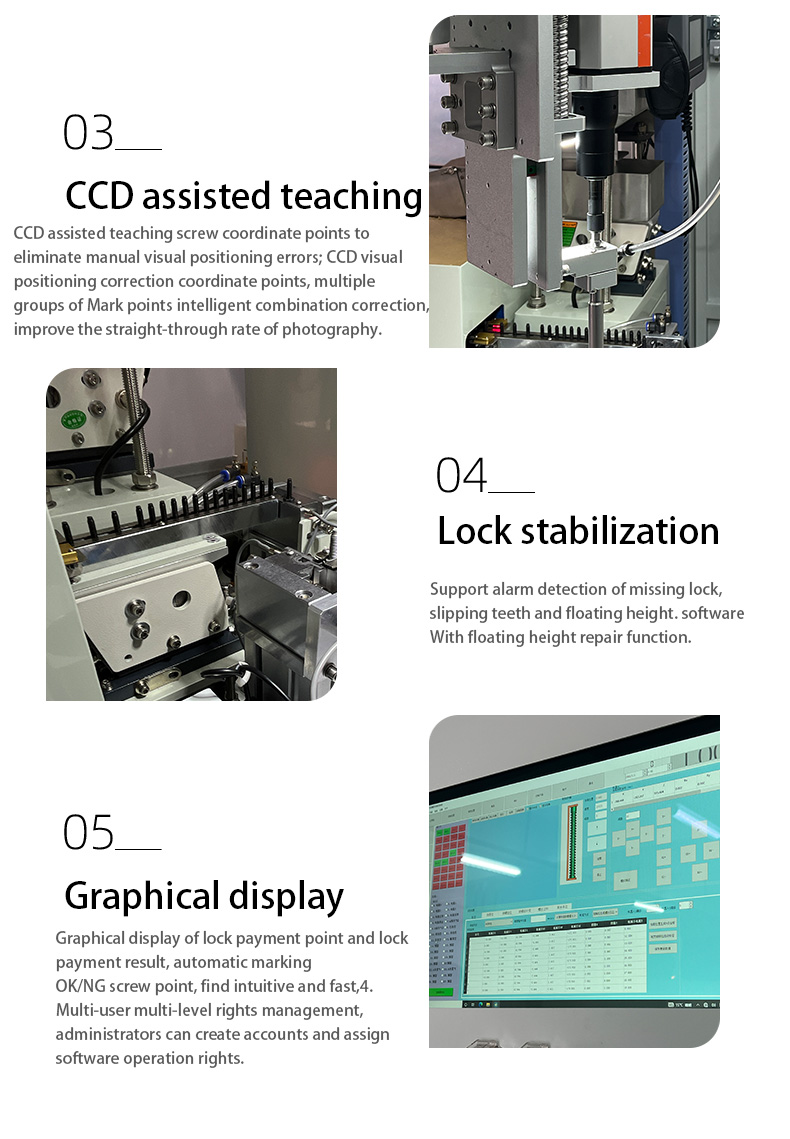
3. Gulp töleg nokadyny we gulp töleg netijesini grafiki görnüşde görkeziň, OK / NG nurbat nokadyny awtomatiki belläň, içgin we çalt tapyň;
4 .. Köp ulanyjy we köp derejeli hukuklary dolandyrmak, dolandyryjylar hasap döredip we programma üpjünçiliginiň amal hukuklaryny belläp bilerler
5.CCD el bilen wizual ýerleşiş ýalňyşlyklaryny aradan aýyrmak üçin nurbat koordinat nokatlaryna kömek etdi; KCD wizual ýerleşiş düzediş koordinat nokatlary, Mark nokatlarynyň köp topary akylly kombinasiýa düzedişi, surat geçiş tizligini ýokarlandyrýar;
6. missingitirilen gulpuň, dişleriň süýşmeginiň we beýik ýüzmeginiň duýduryş tapylmagyny goldaň. Programma üpjünçiligi ýüzýän beýikligi bejermek funksiýasy bilen gelýär;
7.Z oky lazer süýşüriş datçigi (ýüzýän beýikligi ölçemek üçin) we basyşy kesgitlemek datçigi (islege görä) bilen düzülip bilner;
8. Elektrik partiýasy HIOS elektrik partiýasy, Qili tizlikli elektrik partiýasy, servo elektrik partiýasy, akylly elektrik partiýasy we ş.m. bilen üpjün edilip bilner (islege görä);
9. Enjam, tork, öwrümleriň sany, Burç, tork egrisi, gulp ýagdaýy ýaly müşderileriň talaplaryna laýyklykda MES-i ýükläp biler.
10.Manual skaner we awtomatiki skaner saýlanyp bilner (islege görä)
11 .. Önümçilik maglumatlary yzarlap bolýar we programma üpjünçiligi hil dolandyryş tagtasy bilen gelýär. Datahli görnüşli maglumatlary ýükläp we göçürip alyp bolýar (islege görä);
12. Awtomatiki tork nokadyny barlamak, tork nokadyny barlamagyň netijelerini we talaplaryny saklaň (islege görä).

Jikme-jiklikler